自主高性价比、高精度车规级姿态感知、倾角感知模组-应用消费级无人机、自动驾驶、机器人、智能制造、基础设施、智能穿戴等
在小说阅读器中沉浸阅读
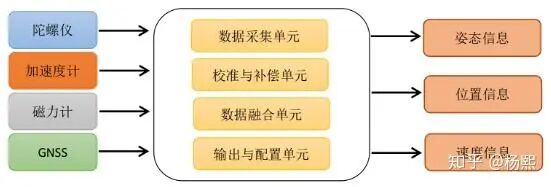
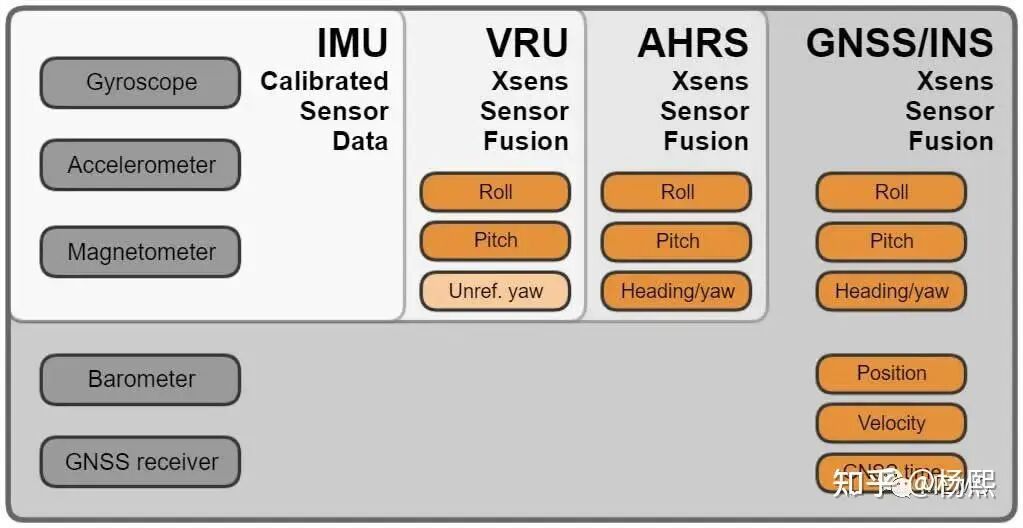
- IMU 惯性测量单元(Inertial Measurement Unit) 是测量物体三轴角速度和加速度的设备。一个IMU内可能会装有三轴陀螺仪和三轴加速度计,来测量物体在三维空间中的角速度和加速度。严格意义上的IMU只为用户提供三轴角速度以及三轴加速度数据。
- VRU 垂直参考单元(Vertical Reference Unit)是在IMU的基础上,以重力向量作为参考,用卡尔曼或者互补滤波等算法为用户提供有重力向量参考的俯仰角、横滚角 以及无参考标准的航向角。通常所说的6轴姿态模块就属于这类系统。航向角没有参考,不管模块朝向哪里,启动后航向角都为0°(或一个设定的常数)。随着模块工作时间增加,航向角会缓慢累计误差。俯仰角,横滚角由于有重力向量参考,低机动运动情况下,长时间不会有累积误差。
- AHRS 航姿参考系统(Attitude and Heading Reference System)AHRS系统是在VRU的基础上增加了磁力计或光流传感器,用卡尔曼或者互补滤波等算法为用户提供拥有绝对参考的俯仰角、横滚角以及航向角的设备,这类系统用来为飞行器提供准确可靠的姿态与航行信息。我们通常所说的9轴姿态传感器就属于这类系统,因为航向角有地磁场的参考,所以不会漂移。但地磁场很微弱,经常受到周围带磁物体的干扰,所以如何在高机动情况下抵抗各种磁干扰成为AHRS研究的热门。
- GNSS/INS 这是一种组合导航系统,顾名思义这种系统是利用全球卫星导航系统(Global Navigation Satellite System 简称GNSS,它是GPS,北斗,GLONASS、GALILEO等系统的统称) 与惯性导航(Inertial Navigation System)各自的优势进行算法融合,为用户提供更加精准的姿态及位置信息。
(欧拉角,或者叫姿态)
6轴模块航向角飘移是必然的,只是程度的高低不同而已,器件决定性能,算法不是万能。由于航向角没有绝对的参考标准,只能靠陀螺角速度积分获得,积分必然带来积分误差,所以随着时间的推移,必然会造成航向角越来越不准。
需要注意的是所有姿态模块都需要上电静止1s左右以获得陀螺零偏,否则航向角飘移会更严重
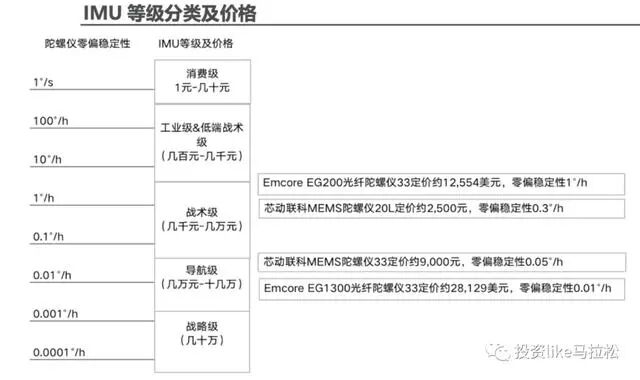
- IMU分类
IMU根据其性能和精度分为不同等级,如战略级、导航级、战术级和消费级,对应的价格也相差较大,消费级的IMU,则主要应用于消费电子的智能手机、TWS耳机、游戏手柄、消费无人机、扫地机器人等产品,上,价格几十元以内;战术级的IMU主要应用于高端领域,如航空航天、无人系统、自动驾驶和我们关注的人形机器人等产品上。
- IMU模组
使用业界先进的车规级MEMS六轴加速度/角速度传感器,模组内置自研 AHRS 算法,可实现 1000Hz 的传感器数据读取和姿态解算频率;模组可以持续追踪高动态运动而不产生累积误差;同时也能在低动态/静止条件下保持0.2°/0.2°/1°(Roll/Pitch/Yaw)的输出精度。
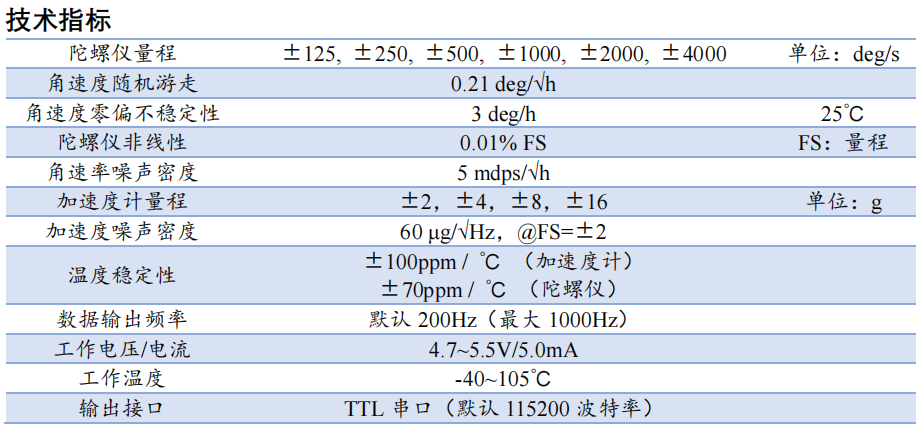
应用场景主要在体育运动数据采集分析、行人导航、VR/AR 6DOF姿态跟踪、手持式交互娱乐设备、倾角测量、倾角开关、无人车自主导航、平衡车平稳控制、无人机平稳/姿态控制、使用C/C++API进行数据采集研究等方面。

- ST iNEMO惯性模块
iNEMO系统级封装 (SiP) 在6轴单片式解决方案内整合了加速度计和陀螺仪。
多个传感器输出的集成确保了运动感测系统的超高精度,适用于要求严苛的应用,如增强型手势识别、游戏、增强现实、室内导航和基于定位的服务。
不断丰富的iNEMO系列传感器
意法半导体的iNEMO产品组合包括惯性测量模块、具有机器学习内核的模块和智能传感器处理单元。
不断丰富的iNEMO系列传感器
意法半导体的iNEMO产品组合包括惯性测量模块、具有机器学习内核的模块和智能传感器处理单元。
- 惯性测量模块
这些传感器为应用开发人员提供了一流的运动感测以用于方向和姿势检测,与简单的移动检测相比具有更加复杂的特性和功能。这些模块的设计集成了硬件特性,能够实现高效可靠的运动跟踪和情境感知。 - 内嵌机器学习内核的传感器
iNEMO惯性模块内嵌机器学习内核 (MLC),在系统层面更省电。MLC是一种传感器内引擎,采用基于分类的AI算法(决策树),能够在传感器检测运动数据的同时运行不同任务。 - 带有智能传感器处理单元的传感器
这种全新类型的传感器基于高度集成的超低功耗电路。智能传感器处理单元 (ISPU) 是一种微型C语言可编程处理器,可在传感器内执行信号处理和AI算法,并与常见的开发工具兼容。ISPU传感器支持信号处理和AI推理、机器学习和深度学习,甚至支持二进制神经网络,能够以微瓦级的功率预算提供广泛的编程灵活性。
了解iNEMO产品组合

在可听戴设备和电池供电应用中实现全新的用户交互方式和精准的音频骨传导

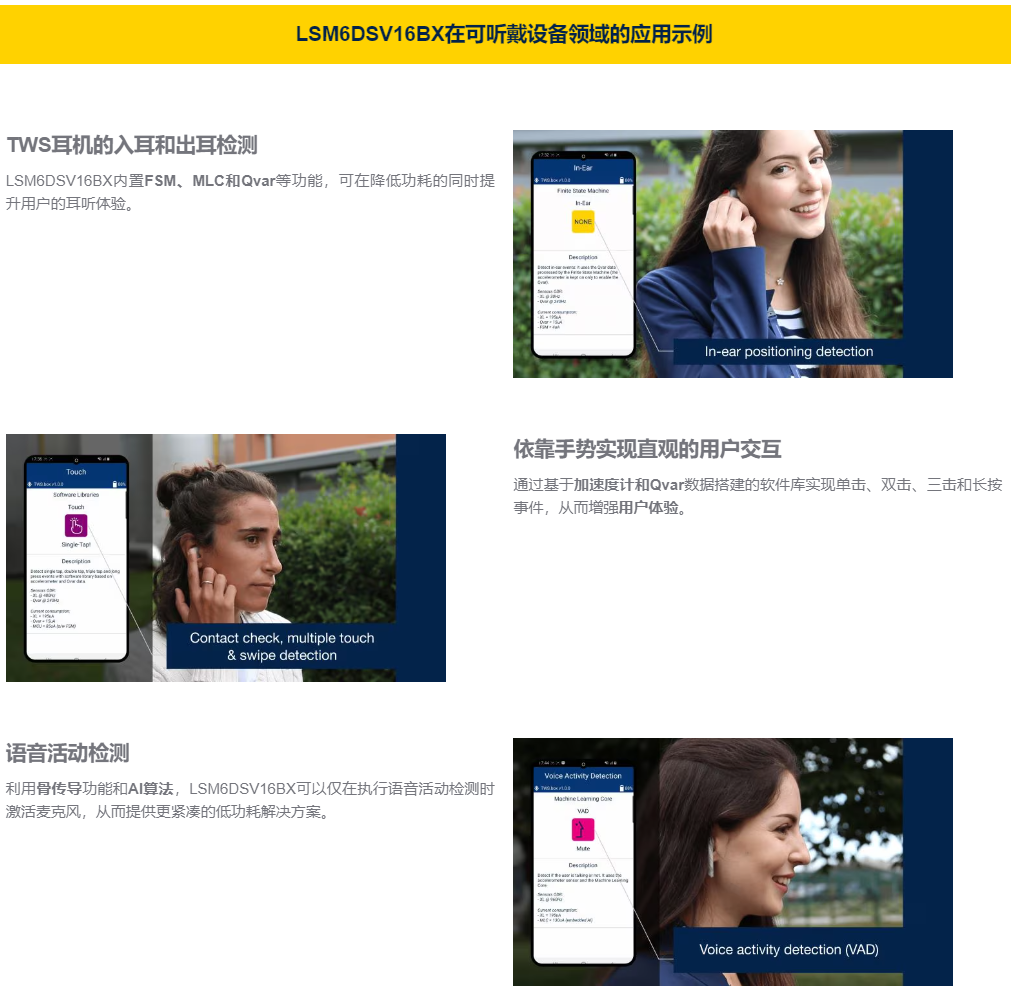
独特的超集成LSM6DSV16BX IMU将人类感官与环境结合,实现卓越的聆听体验。该器件功能十分丰富,可用作6轴IMU来实现头部跟踪和活动检测,可用作音频加速度计来实现骨传导,可用作触摸传感器来支持用户交互(触摸、长按和滑动操作),在具有Qvar功能时,还可用作入耳检测传感器。它能代替四种传感器,更容易打造出别致小巧的设计,并提供更多的空间来容纳大尺寸电池。
IMU集成了一个音频加速度计来实现骨传导检测,一个3轴加速度计和一个3轴陀螺仪来实现用户界面和交互。
该智能器件支持利用AI算法进行边缘处理、低功耗传感器融合及动态自配置,在TWS耳机、标准或运动耳塞等可听戴设备、助听器、AR/VR耳机和智能眼镜等应用中可大大提升电池自主性。
LSM6DSV32XTR是意法半导体的高性能、低功耗6轴IMU,含32g加速度计和陀螺仪,支持三通道架构,具备AI功能,适用于UI、OIS和EIS数据处理,具有低功耗、自适应自配置等特性。
LSM6DSV32XTR是意法半导体的一款高性能、低功耗 6 轴小型 IMU,具有 32 g 的 3 轴数字加速度计和 3 轴数字陀螺仪,属于LSM6DSV32X系列,此系列提供具有三通道架构的最佳 IMU 传感器,用于处理三个独立通道(用户界面、OIS 和 EIS)上的加速度和角速率数据,并具有专用的配置、处理和过滤功能。
该设备利用嵌入式高级专用功能(例如用于可配置运动跟踪的有限状态机 (FSM) 和用于情境感知的机器学习核心 (MLC))以及可为物联网应用导出的 AI 功能,从而实现边缘计算中的流程。
LSM6DSV32X 支持自适应自配置 (ASC) 功能,该功能允许 FSM 根据特定运动模式的检测或基于 MLC 中配置的特定决策树的输出自动实时重新配置设备,而无需主机处理器的任何干预。
该设备嵌入 Qvar(电荷变化检测),用于用户界面功能,例如点击、双击、三击、长按或 L/R - R/L 滑动。
LSM6DSV32X 嵌入一个模拟集线器,能够连接外部模拟输入并将其转换为数字信号进行处理。
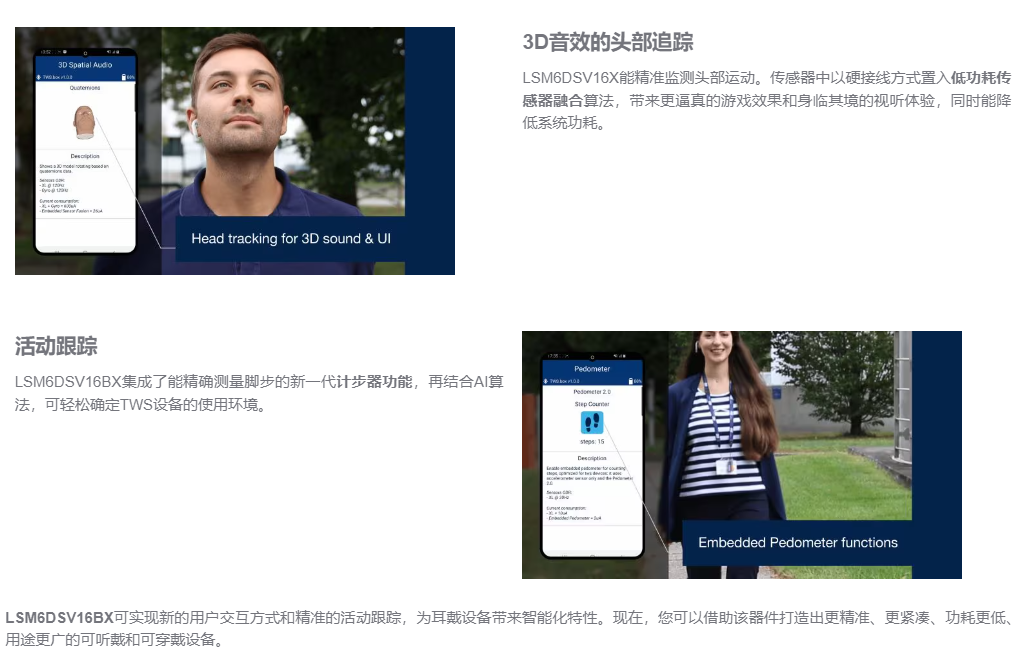
LSM6DSV32X已有多个落地的应用案例,例如笔记本电脑的姿态检测(判断笔记本电脑在桌上、腿上,还是在包里,以实现工作模式切换)、折叠屏手机的打开角度检测、智能手表的手部姿态检测、TWS耳机的头部姿态检测(实现3D空间音效)等。
最新的ASM330LHBG1 6轴IMU适用于汽车应用,在极端环境下也能稳定工作,支持高达125 °C的扩展工作温度范围,适合在发动机舱周围或阳光直射区域使用。
ASM330LHBG1
- 通过AEC-Q100 1级认证
- 与经过认证的软件库一起使用时,符合ASIL B级标准
- (ISO 26262:2018)
- 更宽的温度范围:-40 °C至+125 °C
- 内嵌补偿机制,确保器件在整个温度范围内保持卓越的稳定性
- 具有有限状态机和机器学习内核

《自主高性价比、高精度车规级姿态感知、倾角感知模组-应用消费级无人机、自动驾驶、机器人、智能制造、基础设施、智能穿戴等》 是转载文章,点击查看原文。


